

Sols 4398-4401: Holidays Ahead, Rocks Under the Wheels
4 min read
Sols 4398-4401: Holidays Ahead, Rocks Under the Wheels

Earth planning date: Wednesday, Dec. 18, 2024
It’s almost holiday time, and preparations are going ahead on Earth and Mars! For myself that means having a packed suitcase sitting behind me to go on my holiday travels tomorrow morning. For Curiosity that means looking forward to a long semi-rest, as we will not do our usual planning for the geology and mineralogy, but will still be monitoring the atmospheric conditions throughout. Today should have been a normal planning day with lots of contact and remote science. Well, Mars had other ideas.
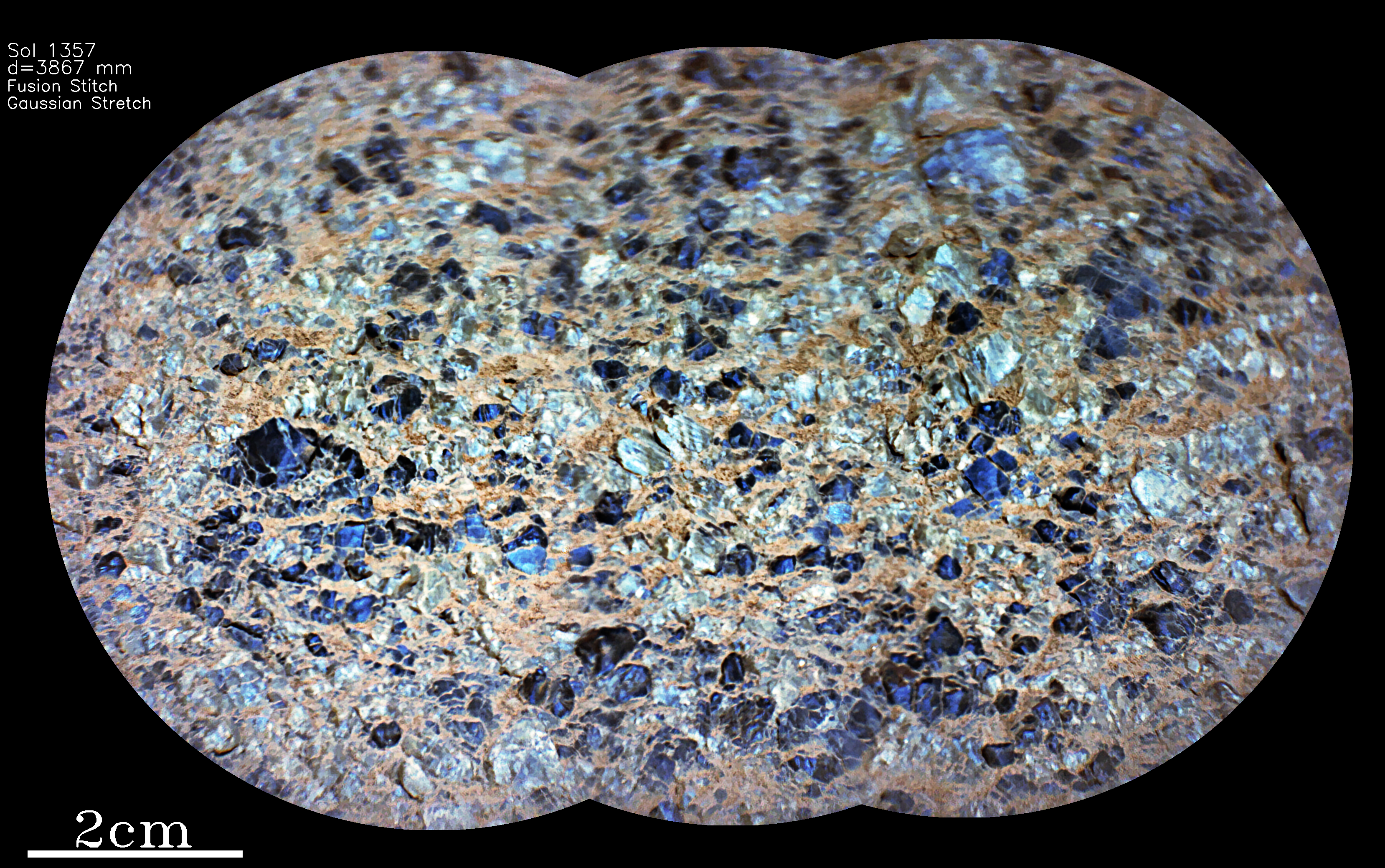
The regular readers of this blog know that we are driving through quite difficult terrain. The image above gives a good impression on what the rover is dealing with: lots of rocks embedded in sand. I think even hiking would be quite difficult there, let alone driving autonomously. Curiosity, thanks to our excellent rover drivers, makes it successfully most of the time, but here and there Mars just doesn’t play nice. Thus, the rover stopped after 14 meters (about 46 feet) of a planned much longer drive. One of the wheels had caught a low spot between two rocks, and — safety first — the rover stopped and waited for our assessment. The rover drivers found no major problem, as it’s just the middle wheel that hit a bit of a rough patch, and driving can continue in this plan. But better safe than sorry, especially on another planet where there are no tow trucks to get us out of difficulty!
There was, however, quite a bit of discussion before we decided that course of action. Not because of the wheels themselves, but because the rover also stands in a position where it can only communicate directly with Earth in limited ways as the antenna is not facing the expected direction after the sudden stop. Of course, we still have the orbiters to talk to our rover, so we know it’s all fine. And — all things are three — this all happened on the penultimate plan of the year! Friday we’ll be planning a large set of sols that the rover will be executing on its own on Mars, monitoring the atmosphere and taking regular images of its surroundings, while the Earth-based team enjoys the well-deserved break. We really want to make sure to have everything going right on a day like today, so we all can enjoy the holidays without worrying about the rover!
With today being the last day of normal science planning, we had lots of ideas, but had to keep the arm stowed. The drive fault also meant that we had to forego arm movements, as the rover was sitting on a few rocks, and one of the wheels in that little depression that stopped us, all in ways that meant that a shift of rover weight (such as occurs when we move the arm) could make the rover move. Avoiding this situation, the team kept the arm stowed and focused on remote observations today. ChemCam observes a vein target called “Monrovia Peak” and takes remote images on the target “Jawbone Canyon” and up Mount Sharp toward the yardang unit. Mastcam looks at the target “Circle X Ranch” to investigate the material around the rocks embedded in the sand, looks at “Anacapa Island,” which is a vein target, “Channel Islands,” which is an aeolian ripple, and target “Gould Mesa,” which gets the team especially excited as this is the first glimpse of the so-called boxwork structures, which we saw from orbit even before Curiosity landed. Finally, we drive away from the spot that held us up today. Let’s hope Mars has read the script this time!
For the looooong break, we are planning autonomous and remote investigations only, and this starts before Friday’s planning, so that we know all is ok! Thus, the other three sols in today’s planning have Aegis, the automated ChemCam LIBS observation, a Mastcam 360° mosaic, and many, many atmospheric observations. It’s going to be a feast for DAN, REMS, and generally the atmospheric science on Mars, while here on Earth we enjoy the treats of the season. The Curiosity team hopes you do, too. See you in 2025!
Written by Susanne Schwenzer, Planetary Geologist at The Open University
Share
Details
Related Terms
Explore More





Powered by WPeMatico











{kind=link}